

設定するとき
MRCC (全車速追従機能付) は、次のすべての条件を満たしているときに作動します。
-
MRCC (全車速追従機能付) がONのとき
-
ブレーキペダルを踏んでいないとき
-
パーキングブレーキが解除されているとき (電動パーキングブレーキ (EPB) 表示灯が消灯しているとき)
-
DSCが故障していないとき
-
全てのドアが閉まっているとき
-
運転席シートベルトを着用しているとき
-
セレクトレバーがDまたはM (マニュアルモード) のとき
-
次の場合、30 km/h以下のときはMRCC (全車速追従機能付) が使用できません。また、アクティブ・ドライビング・ディスプレイに「車速30km/h以下でMRCCが作動しません」とメッセージが表示されます。
-
フォワードセンシングカメラが対象物を検知できなくなったとき (故障やフロントガラスが汚れたとき)
-
停車保持制御の機能が故障したとき
-
電動パーキングブレーキ (EPB) が故障したとき
-
-
エンジン始動直後は、DSCの作動チェックのため、MRCC (全車速追従機能付) がセットできないときがあります。


ONする
-
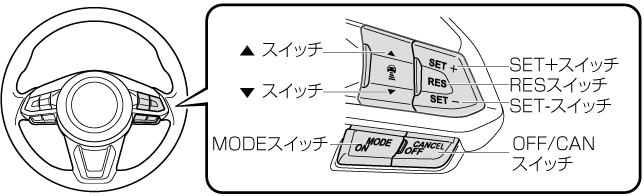
MODEスイッチを押すと速度の設定や追従走行時の車間距離の設定ができる状態になり、MRCC (全車速追従機能付) ディスプレイ表示およびMRCC (全車速追従機能付) 作動状態表示 (白) がアクティブ・ドライビング・ディスプレイに表示されます。
速度を設定する
-
-
アクセルペダルの操作で設定したい速度に調整します。
-
SET
 またはSET
またはSET スイッチを押すと定速走行をはじめます。アクティブ・ドライビング・ディスプレイに設定速度が表示され、MRCC (全車速追従機能付) 作動状態表示が白色から緑色に、車間表示の白線表示が白色の塗りつぶし表示に変わります。同時にMRCC (全車速追従機能付) セット表示灯 (緑) が点灯し、チャイムが1回鳴ります。
スイッチを押すと定速走行をはじめます。アクティブ・ドライビング・ディスプレイに設定速度が表示され、MRCC (全車速追従機能付) 作動状態表示が白色から緑色に、車間表示の白線表示が白色の塗りつぶし表示に変わります。同時にMRCC (全車速追従機能付) セット表示灯 (緑) が点灯し、チャイムが1回鳴ります。
-

|
走行状態 |
ディスプレイ表示 |
|---|---|
|
定速走行時 |
 |
|
追従走行時 |
 |
-
定速走行中に前方車を検知すると、ディスプレイに前方車表示が表示され、追従走行を行います。また、前方車を検知しなくなったときは、ディスプレイの前方車表示が消灯し、定速走行に切り替わります。
-
MRCC (全車速追従機能付) の設定速度の下限は30 km/hです。
-
設定した速度より速い速度で走行している車両を、前方車として追従走行することはできません。アクセルペダルの操作で希望の速度に調節してください。
追従走行時の車間距離を設定する
 スイッチを押すことにより車間距離を短く設定します。
スイッチを押すことにより車間距離を短く設定します。 スイッチを押すことにより車間距離を長く設定します。車間距離は長、中、短、極短の4段階で設定できます。
スイッチを押すことにより車間距離を長く設定します。車間距離は長、中、短、極短の4段階で設定できます。
|
車間距離の目安 (約80 km/h走行時) |
ディスプレイ表示 |
|---|---|
|
長 (約50 m) |
 |
|
中 (約40 m) |
 |
|
短 (約30 m) |
 |
|
極短 (約25 m) |
 |
-
車間距離は速度により異なり、速度が遅いほど車間距離は短くなります。
-
電源ポジションをACCまたはOFFにしたときは、次回エンジン始動時に前回設定した車間距離が自動的に設定されます。
設定速度を変更する
スイッチで加速/減速するとき
SETスイッチを押すと加速し、SETスイッチを押すと減速します。
-
短押し:5 km/h
-
長押し:10 km/h
アクセルペダルで加速するとき
アクセルペダルを踏んで、希望の速度になったところで、SETスイッチまたはSETスイッチを押し、手を放します。スイッチを操作しなければ、アクセルペダルから足を放すと、もとの設定速度にもどります。
-
停車保持制御中にSET
スイッチまたはSETスイッチを操作すると、設定速度を変更することができます。 -
追従走行中にSET
スイッチで加速したとき、設定速度の調節はできますが加速はしません。前方車がいなくなったとき、設定速度になるまで加速し続けます。設定速度はディスプレイの設定速度表示で確認してください。 -
アクセルペダルを踏んでいるときは、ディスプレイの車間距離表示は白線表示になります。
一時的に解除されるとき
次のようなときは、MRCC (全車速追従機能付) が一時的に解除され、アクティブ・ドライビング・ディスプレイ内のMRCC (全車速追従機能付) 作動状態表示が緑色から白色に変わり、同時にメーター内のMRCC (全車速追従機能付) セット表示灯 (緑) が消灯します。
-
OFF/CANスイッチを1回押したとき
-
ブレーキペダルを踏んだとき
-
パーキングブレーキをかけたとき
-
セレクトレバーがP、NまたはRレンジになったとき
-
いずれかのドアを開けたとき
-
運転席のシートベルトを外したとき
次のようなときは、マツダ・レーダー・クルーズ・コントロール (MRCC) キャンセル表示とチャイムが1回鳴ります。
-
DSCが作動したとき
-
スマート・ブレーキ・サポート (SBS) が作動したとき
-
アドバンスト・スマート・シティ・ブレーキ・サポート (アドバンスト SCBS) が作動したとき
-
下り坂を長時間走行したとき
-
システムに異常が発見されたとき
-
停車保持制御中に自動でパーキングブレーキがかかったとき
-
レーダーセンサー (フロント) が対象物を検知できなくなったとき (雨、霧、雪など天候が悪いときやラジエーターグリルの前面が汚れたとき)
制御を再開するとき
MRCC (全車速追従機能付) が一時的に解除された場合、再度作動条件をすべて満たしたときにRESスイッチを押すと、一時的に解除された前の設定速度で作動します。
OFFする
MRCC (全車速追従機能付) が作動中に、OFF/CANスイッチを2回押すと、MRCC (全車速追従機能付) がOFFになります。
