



トップビュー/リアビュー
後退時、または駐・停車時に周囲の安全を確認するときの補助としてご使用ください。
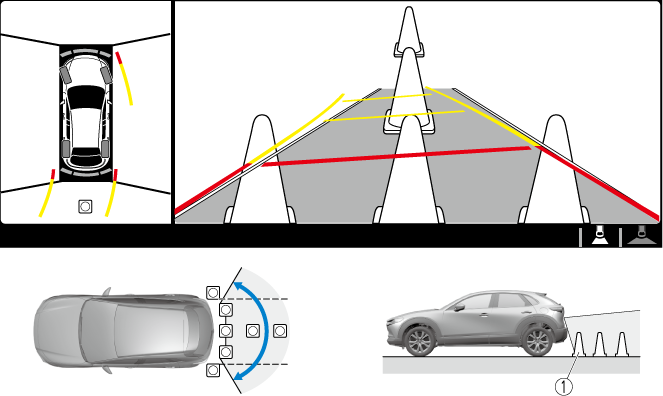
画面に映し出される範囲
-
対象物
-
トップビュー画面は、車両アイコン前後の黒い範囲および各カメラからの映像のつなぎ目は死角となります。
-
トップビュー画面は、各カメラからの映像を加工処理し表示しているため、次のように表示される場合があります。
-
いずれかのカメラで色味のあるものを広い範囲写すと、画面全体が影響を受け、その色で表示されることがあります。
-
リアビューで表示されている障害物が表示されないことがあります。
-
車両の傾きで各カメラの位置や角度が変わると映像がずれて表示されることがあります。
-
路上の線が映像のつなぎ目でずれて表示されることがあります。
-
いずれかのカメラ付近の照度条件により、画面全体が明るく/暗く表示されることがあります。
-


画面の見方
|
表示/アイコン |
内容 |
|
|---|---|---|
|
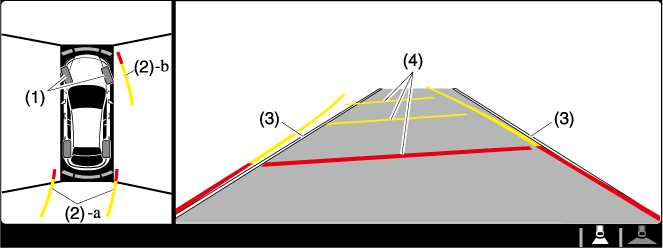
(1) |
タイヤアイコン |
タイヤの向きを示します。ハンドル操作に連動して動きます。 |
|
(2) |
予想進路線 (黄色/赤色) |
車両の予想進路の目安を示します。ハンドル操作に連動して動きます。 a) 後輪が通過する目安を示すライン b) 車両の外側が通過する目安を示すライン |
|
(3) |
車幅延長線 (青色) |
車幅の延長の目安を示します。 |
|
(4) |
予想進路距離目安線 (黄色/赤色) |
車両後方の距離 (バンパー後端から) を示します。
|
予想進路線の使用方法
-
後退時にハンドル操作を行なうと、車両の先端が外側に大きく振れます。車両と障害物の間は十分な間隔を保ってください。
-
パーキングセンサーの検出範囲には限界があります。たとえば、側方から近づく障害物や背の低いものなどは検出できないことがあります。必ず周囲の安全を直接確認しながら運転してください。
詳細はパーキングセンサーの検知表示とブザーを参照してください。
→参照「パーキングセンサーとは」
-
駐車するときは、次のように画面に映し出される映像と実際の状況は異なることがありますので、必ず後方および周囲の安全を直接確認しながら運転してください。
-
画面に映し出される駐車スペース (車庫など) の後端と距離目安線が平行に見えていても、実際には平行ではないことがあります。
-
駐車場の区画線が片側しかないときは、区画線と車幅延長線が平行に見えていても、実際には平行ではないことがあります。
-
-
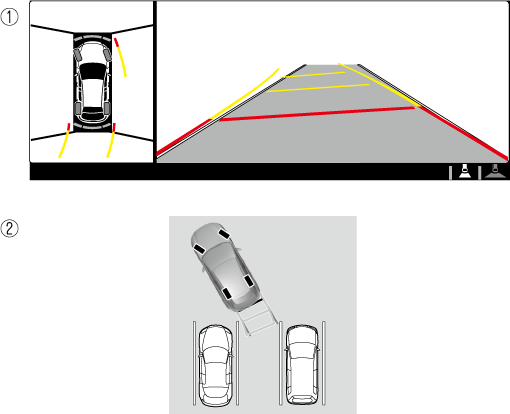
次に示す状況は、ハンドルを左側にまわして後退し、駐車する例を示しています。逆方向から後退し駐車するときは、左右が逆になります。
-
車両が駐車スペースの中に入るようにハンドル操作を行ない後退します。
-
(画面の状況)
-
(実際の状況)
-
-
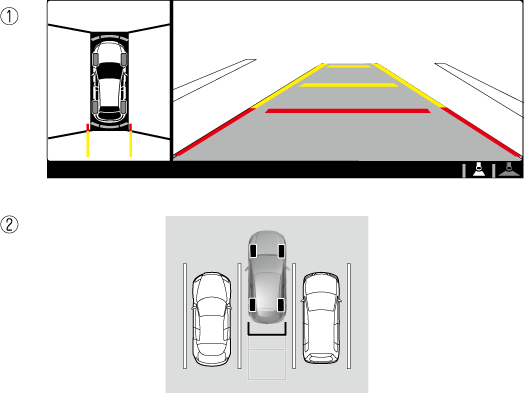
車両が駐車スペース内に入ったら、車幅延長線と駐車スペース左右の間隔が、車両付近の位置で同じくらいになるようにハンドルを操作して、ゆっくり後退します。
-
車幅延長線と駐車スペースが平行になったら、ハンドルを直進状態にして、ゆっくり後退します。周囲の状況を十分に確認し、最適な位置で停止します。 (駐車スペースに区画線がある場合は区画線と車幅延長線が平行になったとき)
-
(画面の状況)
-
(実際の状況)
-
