



交通標識ディスプレイ表示
次の交通標識をアクティブ・ドライビング・ディスプレイに表示します。
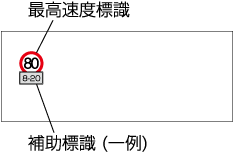
最高速度標識 (補助標識も含む)
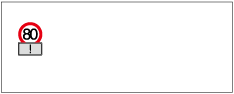
補助標識の条件 (時間帯、右左折時、区間の終わりなど) をフォワードセンシングカメラ (FSC) が正しく分類できなかった場合、次の画面を表示します。
車両進入禁止標識
一時停止標識
追越しのための右側部分はみ出し禁止標識
追越しのための右側部分はみ出し禁止標識は、最高速度標識と同時に表示することができます。
最高速度標識 (補助標識も含む)
-
次の条件をすべて満たしているとき、最高速度標識を表示します。
-
約1 km/h以上で走行しているとき
-
フォワードセンシングカメラ (FSC) が最高速度標識を自車対象標識として認識し、最高速度標識を通過したとき
-
-
次のときは、最高速度標識表示を終了します。
-
最高速度標識を認識し、車両が最高速度標識を通過してから、一定の距離を走行したとき
-
自車が路線を変えたと判断したとき
-
新たに、フォワードセンシングカメラ (FSC) が異なる最高速度標識を認識したとき (新しい最高速度標識を表示する)
-
最高速度標識を表示してから一定の時間経過後、表示中の最高速度標識より約30 km/h以上速度超過しているとき
-
車両進入禁止標識
-
次の条件をすべて満たしているとき、車両進入禁止標識を表示します。
-
約60 km/h以下で走行しているとき
-
フォワードセンシングカメラ (FSC) が車両進入禁止標識を自車対象標識として認識し、車両進入禁止標識を通過したとき
-
-
車両進入禁止標識を認識し、車両が車両進入禁止標識を通過してから、一定の時間経過したときは、車両進入禁止標識表示を終了します。
一時停止標識
-
次の条件をすべて満たしているとき、一時停止標識を表示します。
-
約30 km/h以下で走行しているとき
-
フォワードセンシングカメラ (FSC) が一時停止標識を自車対象標識として認識したとき
-
-
一時停止標識表示を開始してから、一定の時間経過したときは、一時停止標識表示を終了します。
追越しのための右側部分はみ出し禁止標識
-
次の条件をすべて満たしているとき、追越しのための右側部分はみ出し禁止標識を表示します。
-
約1 km/h以上で走行しているとき
-
フォワードセンシングカメラ (FSC) が追越しのための右側部分はみ出し禁止標識を自車対象標識として認識し、追越しのための右側部分はみ出し禁止標識を通過したとき
-
-
次のときは、追越しのための右側部分はみ出し禁止標識表示を終了します。
-
追越しのための右側部分はみ出し禁止標識を認識し、車両が追越しのための右側部分はみ出し禁止標識を通過してから、一定の距離を走行したとき
-
自車が路線を変えたと判断したとき
-


