駐車支援システムは以下のモニターシステムで構成されています。
| · |
サイドモニター
車両左前方側面の映像上に映し出したガイド線で、車の前進と左前側面を補助するシステムです。
|
| · |
バックガイドモニター
車両後方の映像上に映し出したガイド線で、車の後退を補助するシステムです。
|
|
駐車支援システムはあくまでも前進/後退操作を行なうための補助装置です。画面に映し出されている映像と実際の状況は異なることがあります。画面だけを見て前進/後退すると障害物に接触したり、思わぬ事故につながるおそれがあるため、必ず前方/後方および周囲の安全を直接確認しながら運転してください。
|
| · |
以下のような状況では危険ですので、駐車支援システムを使用しないでください。
| · |
タイヤチェーン·応急用タイヤを使用しているとき
|
|
| · |
ディスプレイが冷えているとき、映像が尾を引いたり、画面が通常よりも暗くなり、車両周辺の状況を確認しにくくなる場合があります。必ず後方および周囲の安全を直接確認しながら運転してください。
|
| · |
カメラ部に強い衝撃を与えないでください。カメラの位置や取り付け角度がずれるおそれがあります。
|
| · |
カメラ部は防水構造となっていますので、分解·改造·取りはずしをしないでください。
|
| · |
カメラのカバーは樹脂ですので、油膜取り剤·有機溶剤·ワックス·ガラスコート剤などを付着させないでください。付着したときは、すぐにやわらかい布等でふき取ってください。
|
| · |
カメラのカバーを強くこすったり、研磨剤や硬いブラシなどでみがいたりしないでください。カバーが傷つき、映像に悪影響をおよぼすおそれがあります。
|
|
| · |
タイヤを交換するときは販売店にご相談ください。タイヤ交換すると画面に表示されるガイド線の表示位置が変化することがあります。
|
| · |
カメラのレンズに水滴や雪、泥などがついているときは、やわらかい布等でふき取ってください。よごれがひどい場合は、中性洗剤で洗い流してください。
|
| · |
車両側面/後部をぶつけたときは、カメラ (位置、取り付け角度) がずれているおそれがあります。必ず販売店で確認を行なってください。
|
| · |
寒いときにお湯をかけるなど、カメラ部に急激な温度変化をあたえると、駐車支援システムが正常に作動しなくなるおそれがあります。
|
|
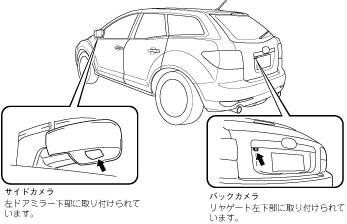
カメラの取り付け位置
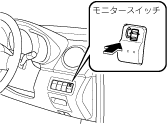
サイドモニターに切り替えるには
エンジンスイッチがONの位置のときに、モニタースイッチを押すとサイドモニターに切り替わります。
| · |
サイドモニター表示中にエンジンスイッチをACCまたはLOCKの位置にしたとき、もしくは連続表示が4分30秒経過したときは、サイドモニターは自動的に解除されます。
|
| · |
バックガイドモニターを表示しているとき、モニタースイッチを押すと、サイドモニターが表示されます。
|
|
バックガイドモニターに切り替えるには
エンジンスイッチがONの位置のとき、セレクトレバーをRに入れるとバックガイドモニターに切り替わります。
|
セレクトレバーをR以外の位置に入れると、バックガイドモニター作動前に表示していた画面に戻ります。
|
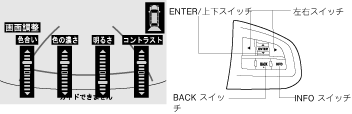
画質調整をするときは
カメラ画面表示中にENTER/上下スイッチを押すと、画面調整画面が表示されます。
調整項目は、色合い、色の濃さ、明るさ、コントラストの4種類があります。
|
|
ENTER/上下スイッチを押し上げるか引き下げて、設定値を変更します。
|
|
|
ENTER/上下スイッチを押して、変更を確定させます。
設定後は操作前の画面 (カメラ画面) に切り替わります。
|
|
画質調整は、車が止まっているときに行なってください。
走行中は、運転操作がさまたげられ思わぬ事故につながるおそれがあります。
|
|
セレクトレバーがRレンジで操作するときは、十分に注意して行なってください。
|
画面に映し出される範囲について
左ドアミラー内に設置されたカメラから、車両左前方側面を映し出します。
| · |
サイドカメラとナビゲーションシステムは保安基準適合部品です。サイドカメラとナビゲーションシステムが故障したときは速やかにマツダ販売店にご相談ください。
|
| · |
自車の状況や路面状況により、映し出される範囲は異なります。
|
| · |
カメラが映す範囲には限界があります。バンパーの下にあるものやバンパーの両端付近は映りません。
|
| · |
サイドモニターのカメラは特殊なレンズを使用しているため、画面に映る映像の距離間隔は実際の距離とは異なります。
|
| · |
装備によってはカメラに写りこむ場合があります。カメラの視野に影響をおよぼすもの (視野を遮るもの、光を発するもの、光沢素材でできているものなど) は取り付けないでください。
|
| · |
次のような状況では、画面が見づらくなることがありますが、故障ではありません。
| · |
雨天時など、カメラに水滴がついたときや湿度が高いとき
|
| · |
太陽やヘッドランプなどの光がカメラのレンズに直接当たったとき
|
|
| · |
車体に反射した太陽の光などの高輝度の光がカメラに映ると、画面上に明るい帯 (光の筋) が発生することがあります。 (スミア現象)
|
|
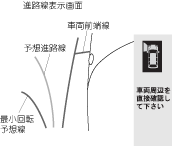
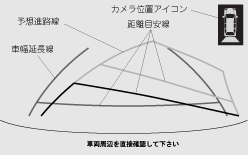
画面の見方
車両の左前方の映像を映し出して発車時、駐·停車時や左側へ旋回するときに周囲の安全を確認するときの補助としてご使用ください。
低速走行時 (車速6km/h未満) では、進路線を表示して左旋回時にハンドル操作の目安として使用することもできます。
車両平行線 (0~6km/h未満···緑色、6km/h以上···赤色)
最小回転予想線 (0~6km/h未満···緑色、6km/h以上···非表示)
| · |
ハンドルをいっぱいまで操作して、もっとも小回りしたときの回転予想の目安を示すライン
ハンドルが左側へ操作されている (直進位置から約90°以上) ときに表示されます。
|
予想進路線 (0~6km/h未満···黄色、6km/h以上···非表示)
| · |
ハンドル操作に連動した進路の目安を示すライン
ハンドルが左側へ操作されている (直進位置から約90°以上) ときに表示されます。
|
車両前端線 (0~6km/h未満···緑色、6km/h以上···赤色)
カメラ位置アイコン
| · |
映し出しているカメラ位置を示し、この場合サイドモニターを表示していることを示します。
|
| · |
ドアミラーを格納したときは、補助線が非表示になります。
|
| · |
車両後退時にサイドモニターの画面を表示した場合、補助線は車両前端線と車両平行線のみ表示されます。ドアミラーを格納したときは、カメラ位置アイコンのみ表示されます。
|
|
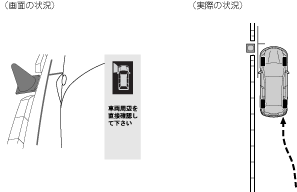
サイドモニターの使用
|
サイドモニターを使って運転する方法は、道路事情·路面状況·自車の状況によって違います。ハンドル操作のタイミング·操作量は状況によって異なりますので、周囲を確認しながら状況に合わせた操作を行なってください。
|
車両平行線
車両平行線が路肩の縁石などの障害物にかかっていないことを確認します。
路肩の縁石などの障害物と車両平行線が重ならないように車両を幅寄せします。このとき車両平行線と目標物が平行になるようにハンドルを操作すると目標物と平行に駐車することができます。
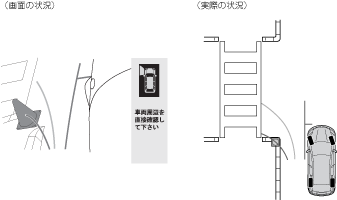
最小回転予想線/予想進路線
最小回転予想線や予想進路線 (表示時) に障害物がかかっていないことを確認します。
最小回転予想線が障害物上にあるときや、最小回転予想線の内側に障害物があるときは、小回りすると障害物に触れる可能性があります。予想進路線を表示しているときは予想進路線が障害物の内側になるハンドル操作量を保持して車両が障害物を通り過ぎるまで前進します。
|
サイドモニターの映像から障害物が見えなくなっても車両が障害物を通り過ぎるまでハンドルを切り足さないでください。ハンドルを切り足すと小回りすることになり障害物に接触する可能性があります。
|
障害物が最小回転予想線の外側にあれば、もっとも小回りした場合でも障害物に触れずに通過することができるという目安になります。
実際の画面と路面の誤差
実際の路面と画面上の路面とでは誤差が生じます。距離感の誤差は事故につながるおそれがありますので、次のような誤差の起こりやすい状況を確認しておいてください。
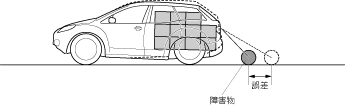
人や荷物の重みで車が傾いているとき
車両が傾いているときは、カメラに映る障害物は車体前部からの距離が実際の位置と違って見えます。
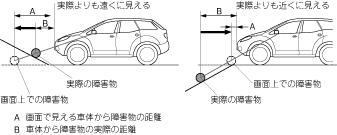
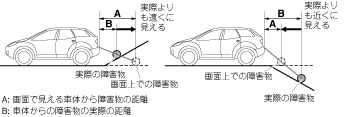
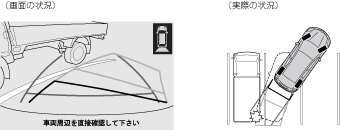
車両前方に勾配の急な上り坂や下り坂があるとき
車両前方に勾配の急な上がり坂 (下り坂) があるときは、カメラに映る障害物は車体前部からの距離が実際よりも遠く (近く) にあるように見えます。
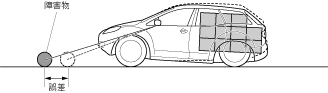
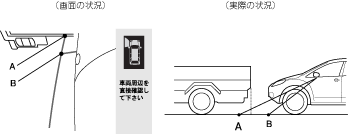
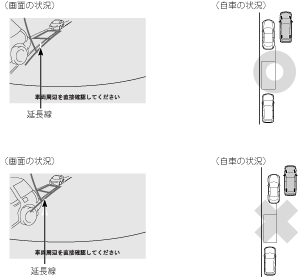
車両前方に立体物があるとき
車両前端線は水平な路面を基準に表示されているため、画面に映っている立体物との距離は実際とは異なります。
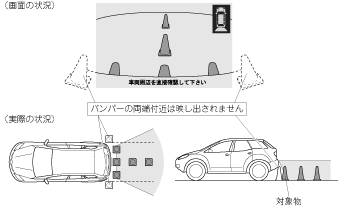
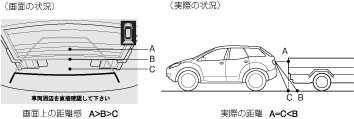
立体物が近くにあるところを通過するとき
張り出しのある立体物 (車や障害物) の近くを通過するとき、予想進路線では立体物に当たらないように見えても、実際にはぶつかることがあります。画面上の予想進路線は水平な路面を基準に表示されているため画面に映っている立体物の位置は実際とは異なります。張り出しのある立体物の近くを通るときは、前方および周辺を直接確認してください。
こんなときは
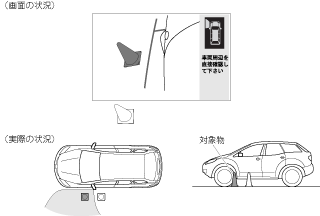
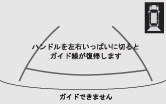
“ガイドできません”のメッセージが表示されたとき
バッテリーを脱着したときなどは“ガイドできません”のメッセージが表示されることがあります。表示されたときは、以下のいずれかの方法で補正してください。
| · |
エンジンをかけている状態で車両を停止させ、ハンドルを右いっぱいにまわしたあと、今度は左いっぱいにまわします。 (左右の順番はどちらでも可。)
|
| · |
できるだけ、曲がり角、カーブがなく、渋滞していない道路を約5分間以上走行します。
|
画面がもとに戻れば補正操作終了です。画面が復旧しないときは、マツダ販売店で点検を受けてください。
画面に映し出される範囲について
車両後方の映像を映し出して駐·停車時に障害物や車間距離を確認するときの補助としてご使用ください。
車両後部に設置されたカメラから、ほぼ水平に映し出します。
| · |
自車の状況や路面状況により、映し出される範囲は異なります。
|
| · |
カメラが映す範囲には限界があります。バンパーの下にあるものやバンパーの両端付近は映りません。
|
| · |
バックガイドモニターのカメラは特殊なレンズを使用しているため、画面に映る映像の距離間隔は実際の距離とは異なります。
|
| · |
バックガイドモニターは鏡面画像になっています。
|
| · |
装備によってはカメラに写りこむ場合があります。カメラの視野に影響をおよぼすもの (視野を遮るもの、光を発するもの、光沢素材でできたものなど) は取り付けないでください。
|
| · |
次のような状況では、画面が見づらくなることがありますが、故障ではありません。
| · |
雨天時など、カメラに水滴がついたときや湿度が高いとき
|
| · |
太陽やヘッドランプなどの光がカメラのレンズに直接当たったとき
|
|
| · |
車体に反射した太陽の光などの高輝度の光がカメラに映ると、画面上に明るい帯 (光の筋) が発生することがあります。 (スミア現象)
|
|
バックガイドモニターの表示モード
バックガイドモニターは次の2つの表示モードを選択することができます。駐車する周囲の状況に応じて2つのモードから選択してください。
|
モード
|
説明
|
使用例
|
|
進路表示モード
|
ハンドル操作に連動した予想進路線などが表示されます。
|
車庫入れ時
|
|
縦列ガイドモード
|
画面表示による縦列駐車の補助が行なわれます。
|
縦列駐車時
|
進路表示モード
画面の見方
ハンドル操作に連動した予想進路線などが表示されます。
予想進路線 (黄色)
| · |
車両の予想進路の目安を示すライン
ハンドルを操作すると、予想進路線が連動して動きます。
|
車幅延長線 (緑色)
| · |
車幅の延長の目安を示すライン
ハンドルが直進状態のときは、表示されません。
|
距離目安線
| · |
車両後方の距離 (バンパー後端から) を示すライン
| · |
ハンドル操作と連動するライン (赤色と黄色) は、それぞれの中心位置で、約0.5m先 (赤色) ·約1m先 (黄色) を示します。
|
| · |
ハンドルが直進状態ではないときは、誤差が生じます。
画面では、距離目安線が示す実際の距離 (赤色: 約0.5m先、黄色: 約1m先) より、右側は近くの位置に、左側は遠くの位置に表示されます。
|
|
カメラ位置アイコン
| · |
バックガイドモニターを表示していることを示します。
|
進路表示モードの使用例
|
バックガイドモニターを使って駐車する方法は、駐車時の道路事情、路面状況、自車の状況によって違います。ハンドル操作のタイミング、操作量は状況によって異なりますので、周囲を直接確認しながら状況に合わせた操作を行なってください。また、操作を行なう前は、必ず駐車スペースに車両が駐車できるかを確認してください。
|
|
次に示す状況は、ハンドルを右側にまわして後退し、駐車する例を示しています。逆方向から後退し駐車するときは、左右が逆になります。
|
|
|
セレクトレバーをRの位置にし、バックガイドモニターを表示します。
|
|
|
予想進路線を参考に、車両が駐車スペースの中に入るようにハンドル操作を行ない後退します。
|
|
|
車両が駐車スペース内にはいったら、車幅延長線と駐車スペース左右の間隔が、車両付近の位置で同じくらいになるようにハンドルを操作して、ゆっくり後退します。
|
|
|
車幅延長線と駐車スペースが平行になるようにハンドルを操作します。
|
|
|
平行になったら、ハンドルを直進状態にして、ゆっくり後退します。周囲の状況を十分に確認し、最適な位置で停止します。 (駐車スペースに区画線がある場合は区画線と車幅延長線が平行になったら)
|
|
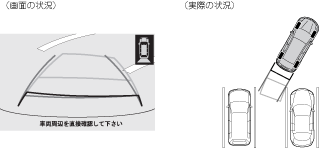
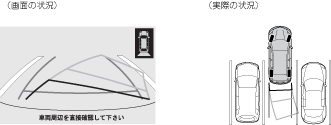
駐車するときは、以下のように画面に映し出される映像と実際の状況は異なることがありますので、必ず後方および周囲の安全を直接確認しながら運転してください。
| · |
画面に映し出される駐車スペース (車庫など) の後端と距離目安線が平行に見えても、実際には平行でないことがあります。
|
| · |
駐車場の区画線が片側しかないときは、区画線と車幅延長線が平行に見えていても、実際には平行ではないことがあります。
|
|
縦列ガイドモード
縦列ガイドモードを使った使用例
| · |
バックガイドモニターを使って駐車する方法は、駐車時の道路事情·路面状況·自車の状況によって違います。ハンドル操作のタイミング·操作量は状況によって異なりますので、周囲を直接確認しながら状況に合わせた操作を行なってください。
また、操作を行なう前は、必ず駐車スペースに車両が駐車できるかを確認してください。
|
| · |
カーブや坂道など平坦·まっすぐではない道路では、使用しないでください。
|
| · |
ハンドル操作は必ず車両を停止させた状態で行なってください。
|
|
| · |
次に示す状況は、左側の駐車スペースに駐車する例を示しています。逆方向から後退し駐車するときは、左右が逆になります。
|
| · |
ガイドを中止したいときは、モニタースイッチを押し続けると、セレクトレバーをRの位置にした ときの状態の画面にもどります。
|
| · |
縦列ガイドモード中にモニタースイッチを押すとサイドモニターの映像が表示されます。サイドモニターの映像表示中は縦列ガイドは行なわれません。サイドモニターの映像表示中に途中で縦列ガイドができなくなったときは、縦列ガイドモードと同様のメッセージが表示されます。
継続中の縦列ガイドを表示させるには、もう一度モニタースイッチを押します。
|
|
|
|
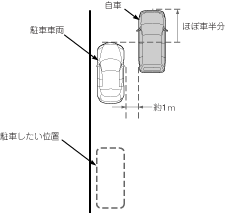
道路 (または路肩) と平行で、駐車車両との間隔が約1mの位置に停止し、ハンドルを直進位置にします。
前後の位置は、駐車車両より車の長さの半分ほど前の位置に停止します。
|
|
|
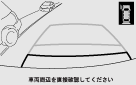
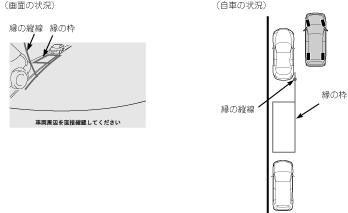
セレクトレバーをRの位置にし、表示された画面で、モニタースイッチを押し続けます。
画面に駐車車両のリヤタイヤより後ろ部分が映っていることを確認してください。映っていないときは車両を元の正しい位置 (駐車車両より車の長さの半分ほど前の位置) まで前進させ操作をやりなおします。
|
|
|
ハンドルを直進位置で保持したまま緑の縦線が隣の駐車車両の後端に合う位置まで後退し、停止します。
|
| · |
ハンドルを直進状態にしないで後退すると、次のガイドまで進んでしまうことがあります。その場合は、駐車車両より車の長さの半分ほど前の位置まで車両を前進させ、最初からやり直してください。
|
| · |
この画面のときセレクトレバーをR以外の位置にしても、約5秒以内にRに戻せば継続してガイドされます。
|
|
|
|
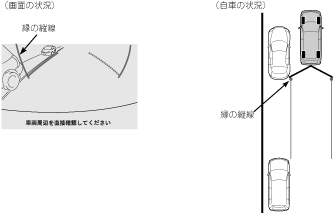
ハンドルを操作して緑の枠を駐車したい位置に合わせます。
|
| · |
緑の枠を駐車位置に合わせるときは、必ず緑の枠の延長線に前方駐車車両のタイヤがかかっていないことを確認します。緑の枠が前方駐車車両にかからない位置で合わせてください。
|
| · |
緑の枠の中や進路に障害物がないことを必ず確認してください。緑の枠の中に障害物がある場合は、縦列ガイドモードは使用しないでください。
|
|
| · |
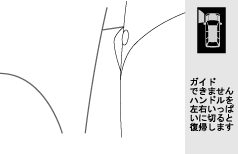
枠が赤くなって、下のようなメッセージが表示される場合、ガイドさせることができませんので、ハンドルをもどしてください。
|
| · |
枠が正常な駐車位置に合っている場合でも、下のようなメッセージが表示されることがあります。この場合、車が路肩から離れすぎていることが考えられますので、前方の駐車車両との間隔 (約1m) を確認してください。
|
| · |
必ず車両を停止させた状態で、ハンドルを操作してください。
|
|
|
|
枠が駐車したい位置に合ったら、ハンドルをそのまま保持し、車両周辺を確認しながら後退します。
|
|
車両を後退させるときは、車両の右前端にも注意してゆっくり車両を後退させてください。
|
| · |
後退中にハンドルを操作してしまうと、ガイドが中止されます。その場合は、セレクトレバーをR以外の位置にして、再度Rにして最初からやり直してください。
|
| · |
ごく低速で後退した場合、次の案内が行なわれないことがあります。
|
| · |
後退を開始するとガイド線が表示されなくなります。必ず後方および周辺を直接確認しながら状況に合わせた操作を行なってください。
|
|
|
|
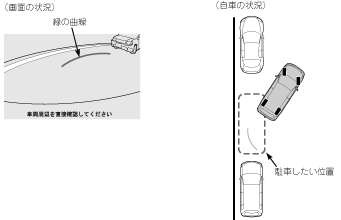
ハンドルを操作する位置が近づくと、緑の曲線が表示されます。
|
|
後退の速度が速いと、案内が間に合わないことがあります。
|
|
|
緑の曲線が駐車したい位置の左端の地点に合うまで、ハンドルをそのまま保持して、車両周辺を確認しながら後退し、車両を停止させます。
|
|
|
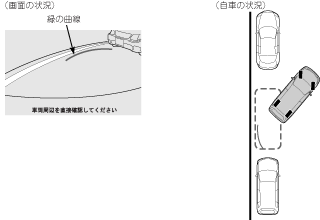
車両を停止させたまま、ハンドルを右側いっぱいにまわします。
ハンドルを操作するとガイド線が切り替わります。
|
|
必ず車両を停止させた状態で、ハンドルを操作してください。
|
|
|
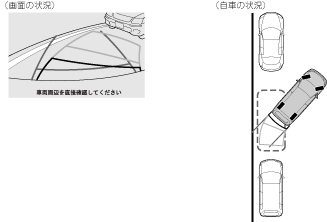
ハンドルをそのまま保持して、周囲を確認しながらゆっくり後退します。
|
|
車両を後退させるときは、車両の左前端にも注意して、ゆっくり後退してください。
|
|
|
車幅延長線を参考にして車両が道路 (または路肩) と平行になったらハンドルを直進位置にして、距離目安線を参考に、必ず目視やミラーで車両の前後を確認してゆっくり後退します。
|
|
|
車両がほぼ直進状態になったら、縦列ガイドモードが終了し、駐車が完了します。
|
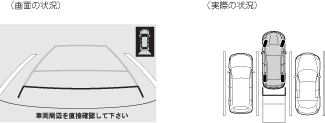
実際の画面と路面の誤差
実際の路面と画面上の路面とでは誤差が生じます。距離感の誤差は事故につながるおそれがありますので、次のような誤差の起こりやすい状況を確認しておいてください。
人や荷物の重みで車が傾いているとき
車両が傾いて後部が下がっているときは、カメラに映る障害物は車体後部からの距離が実際よりも遠くにあるように見えます。
車両後方に勾配の急な上り坂や下り坂があるとき
車両後方に勾配の急な上り坂 (下り坂) があるときは、カメラに映る障害物は車体後部からの距離が実際よりも遠く (近く) にあるように見えます。
車両後方に立体物があるとき
距離目安線は水平な路面を基準に表示されているため、画面に映っている立体物との距離は実際とは異なります。
立体物が近くにあるところを後退するとき
張り出しのある立体物 (車や障害物) の近くを後退するとき、予想進路線では立体物に当たらないように見えても、実際にはぶつかることがあります。画面上の予想進路線は水平な路面を基準に表示されているため画面に映っている立体物の位置は実際とは異なります。張り出しのある立体物の近くを通るときは、後方および周辺を直接確認してください。
こんなときは
“ガイドできません”のメッセージが表示されたとき
バッテリーを脱着したときなどは“ガイドできません”のメッセージが表示されることがあります。表示されたときは、以下のいずれかの方法で補正してください。
| · |
車両を停止させた状態で、ハンドルを右いっぱいにまわしたあと、左いっぱいにまわします。 (左右の順番はどちらでも可。)
|
| · |
できるだけ、曲がり角、カーブがなく、渋滞していない道路を約5分間以上走行します。
|
画面がもとに戻れば補正操作終了です。画面が復旧しないときは、マツダ販売店で点検を受けてください。