

画面上の路面と実際の路面の誤差
画面上の路面と実際の路面とでは誤差が生じます。距離感の誤差は事故につながるおそれがありますので、次のような、誤差の起こりやすい状況を確認しておいてください。
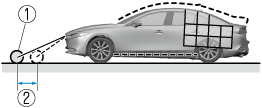
人や荷物の重みで車が傾いているとき
車両が傾いているときは、カメラに映る障害物は車体からの距離が実際の位置と違って見えます。
フロントカメラ
-
障害物
-
誤差
サイドカメラ

-
障害物
-
誤差
リアカメラ

-
障害物
-
誤差
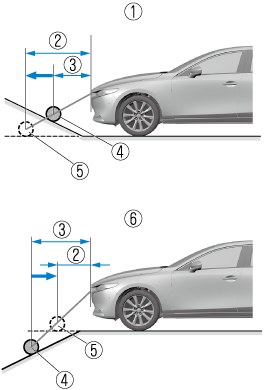
車両前方、または後方に勾配の急な上り坂や下り坂があるとき
車両前方、または後方に勾配の急な上り坂 (下り坂) があるときは、カメラに映る障害物は車体からの距離が実際よりも遠く (近く) にあるように見えます。
フロントカメラ
-
実際よりも遠くに見える
-
画面で見える車体から障害物の距離
-
車体から障害物の実際の距離
-
実際の障害物
-
画面上での障害物
-
実際よりも近くに見える
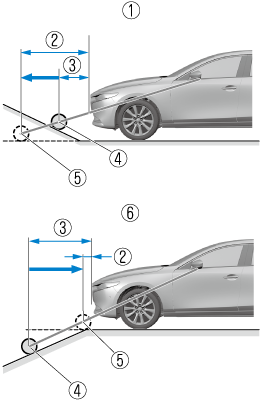
サイドカメラ
-
実際よりも遠くに見える
-
画面で見える車体から障害物の距離
-
車体から障害物の実際の距離
-
実際の障害物
-
画面上での障害物
-
実際よりも近くに見える
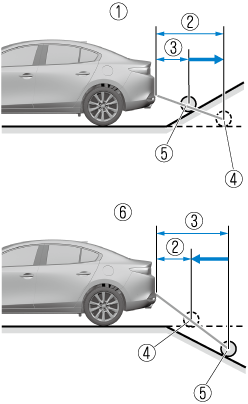
リアカメラ
-
実際よりも遠くに見える
-
画面で見える車体から障害物の距離
-
車体から障害物の実際の距離
-
画面上での障害物
-
実際の障害物
-
実際よりも近くに見える


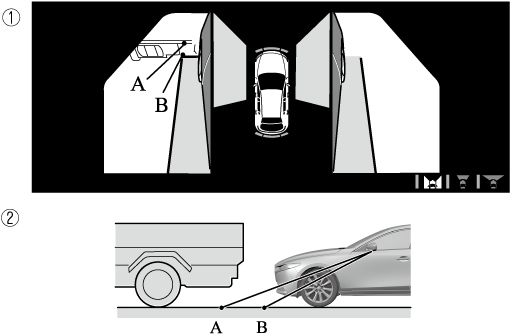
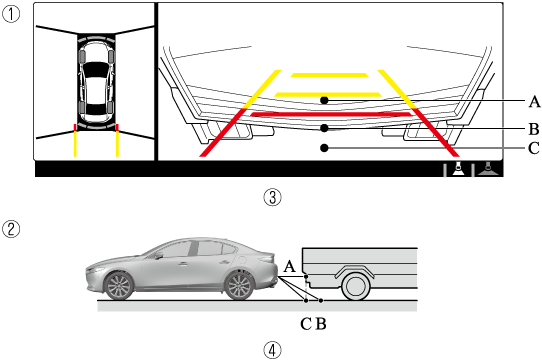
車両前方、または後方に立体物があるとき
車両前端線 (サイドカメラ)、または距離目安線 (リアカメラ) は水平な路面を基準に表示されているため、画面に映っている立体物との距離は実際とは異なります。
サイドカメラ
-
(画面の状況)
-
(実際の状況)
リアカメラ
-
(画面の状況)
-
(実際の状況)
-
画面上の距離感 A>B>C
-
実際の距離 B>C=A
